Windowsにてaviをmp4にする(PowerPoint使用)
タイトルのままではありますが...とても便利。
Windows10にてaviの再生に対応していなかった場合に、もしPowerPointが入っていたらダメ元で試してみるのはあり。
PowerPointにドラッグアンドドロップしてみて、PowerPointが対応していて無事動画の読み込みができたらあとはこっちのもん。
スライド上で再生してプレビューしたり、右クリックメニューからmp4に保存したり。よしなにできる。
何より(PowerPointが入っていれば)追加でソフトを入れたりコマンドを打ったりせず変換できるので敷居がとても低い。良い。最高。
aviの他にも色々対応しているよう。
PowerPoint でサポートされているオーディオ ファイル形式およびビデオ ファイル形式 - Microsoft サポート
.asf
.avi
.mp4、.m4v、.mov
.mpg または .mpeg
.wmv
PowerPointの動画トリミング機能でのトリミングは、書き出しには影響しない。
動画のトリミングはWindowsの「フォト」が便利。
Twitter難しい(´・ω・`)
・フォロー数上限に引っかかってしまった(´・ω・`)
・顔文字を使っているせいか、変なDMが来るようになった
・変なDMが減ることを願い、Bioに♂と書くようにした
・♂をターゲットにしたスパムDMがわんさか届くようになった(´・ω・`)
Windows10でマウスカーソルを含めて画面をキャプチャーする(PowerPoint)
先日、Xbox Game Barで画面を録画する記事を書きました。
Windows10でマウスカーソルを含めて画面をキャプチャーする - 蛍石製作所
PowerPointでも同じことができると気づきました。
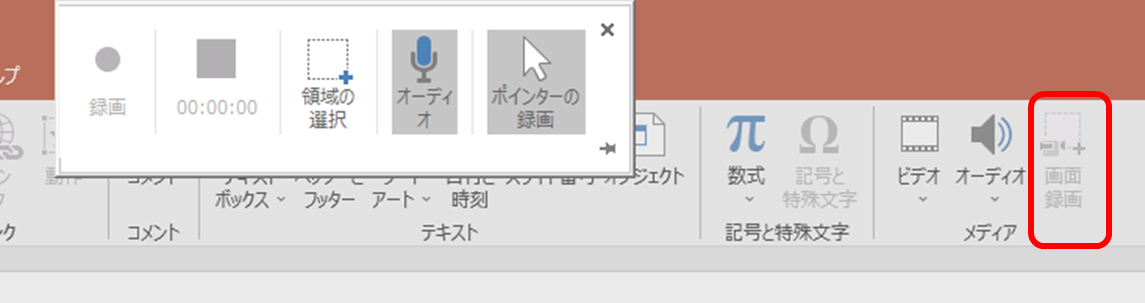
[挿入]→[メディア]→[画面録画]
で下図の画面になります(PowerPointのウィンドウが最小化されることがあります。PowerPointの画面を録りたい際は、タスクバー操作、Alt+Tab等でウィンドウを元に戻せます)。
マウスドラッグで画面の録画範囲を選択して、録画ボタンを押して録画を開始します。
録画終了は、Win+Shift+Qです。
録画された動画は、挿入したビデオと同じようにスライドに挿入されます。録画アプリとPowerPointを行き来しなくても良いので、説明スライドを作りたいときにはとても便利です。
[ポインターの録画]ボタンで、ポインター録画有効無効が切り替えられます。有効にすると、操作説明用動画を録るときに便利です。
[オーディオ]は、PCから鳴る音を録音するオプションと思いきや、PCのマイクの音を録っているようです。操作しながら口頭で説明する際には有効にするとよいでしょうか。(最初に画面録画機能を試した際、黙々と画面操作して録画を終えて再生したら環境音が再生されてびっくりした記憶があります)
動画をmp4で保存する際は、挿入された動画を右クリックして、[メディアに名前を付けて保存]でできます。

小ネタ
挿入された動画は、空のスライドの場合はテキストボックスの中に入ります。テキストボックスと動画を分けたい場合は、動画を選択して切り取り(Ctrl+X)、貼り付け(Ctrl+V)が早いでしょうか。
Windows10でマウスカーソルを含めて画面をキャプチャーする
PDFで3Dモデルをぐりぐりできるようになりました
pdfでキューブぐりぐりできた(´・ω・`) #みくちゃ #Mikuture pic.twitter.com/2f6uD8dMGj
— ふるおらいと (@36kyo) 2022年12月7日
やり方
Designspark MechanicalというCADで、モデルを
名前を付けて保存→.pdf

この文書を信頼する
マウスカーソルが指マークになったらクリック

Designspark Mechanical ダウンロード
https://www.rs-online.com/designspark/mechanical-download-and-installation-jp
[DSM] 3DデザインをPDFでシェア!
宝石展に行きました
上野の国立科学博物館の宝石展を観てきました。
ふるおらいと の元ネタのフローライト(蛍石)につい目が行ってしまい、いっぱい写真を撮りました。他にもダイヤモンドや珍しい宝石などたくさんありました(というかこっちが本編)。いいぞ。
新型コロナウイルス対策のため、入場には予約が必要でした。お気を付けください。
💎。゚(゚´ω`゚)゚。💎#国立科学博物館 #宝石展 pic.twitter.com/J11nSLJACs
— ふるおらいと (@36kyo) 2022年5月7日
👀!!! pic.twitter.com/NADgGTtGNj
— ふるおらいと (@36kyo) 2022年5月7日
紫外線で光っている💎 #宝石展 #国立科学博物館 pic.twitter.com/v81ObuFgsA
— ふるおらいと (@36kyo) 2022年5月7日
バチバチに光っていて良いですね。
モース硬度は4、弱め…。゚(゚´ω`゚)゚。 pic.twitter.com/YhqznBFUtb
— ふるおらいと (@36kyo) 2022年5月7日
蛍石は傷つきやすい方でした。
my new gear…💎。゚(゚´ω`゚)゚。💎 pic.twitter.com/b0D33aiSjT
— ふるおらいと (@36kyo) 2022年5月9日
会場併設のショップで、つい購入してしまいました。